5月13至17日,2024年国际机器人与自动化大会(IEEE International Conference on Robotics and Automation,简称ICRA)于在日本横滨举办,是机器人领域最有影响力的国际学术会议之一,本次现场参会人数超过6000人,是ICRA史上参会人数规模最大的会议。今年大会共收到来自58个国家和地区的3937篇投稿,其中1760篇被录用,并最终产生10个领域,12篇最佳会议论文。

丁汉院士、吴志刚教授团队论文《Design and modeling of a nested bi-cavity-based soft growing robot for grasping in constrained environments(一种基于同轴双气腔结构的包覆抓取生长机器人:设计与建模)》获得机构学和设计最佳论文(中国大陆单位首次入选)。我院博士生雍昊臣、硕士生徐富康为共同第一作者。

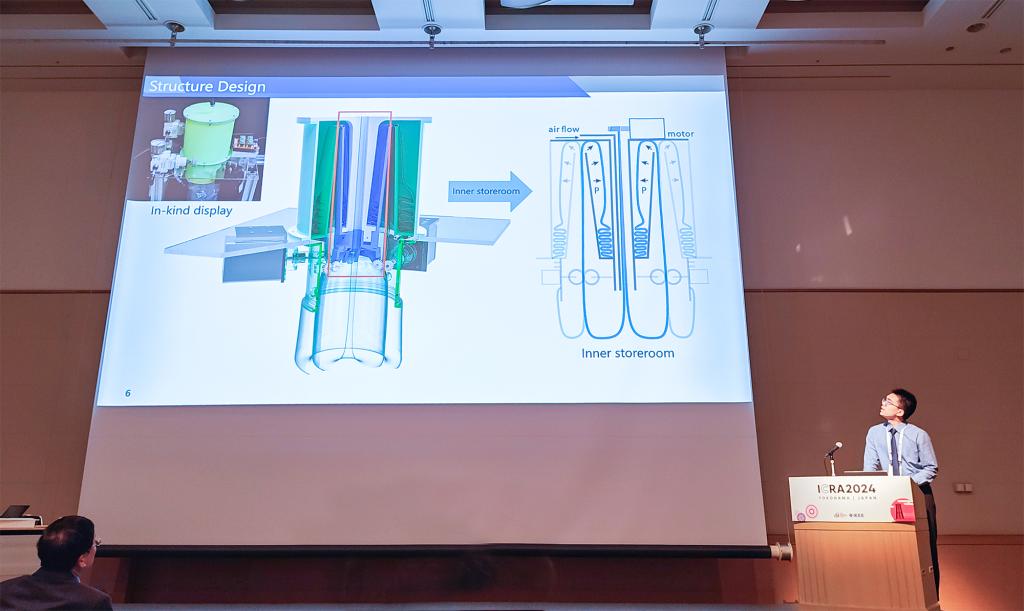
雍昊臣现场汇报
吴志刚教授、博士生雍昊臣、丁汉院士
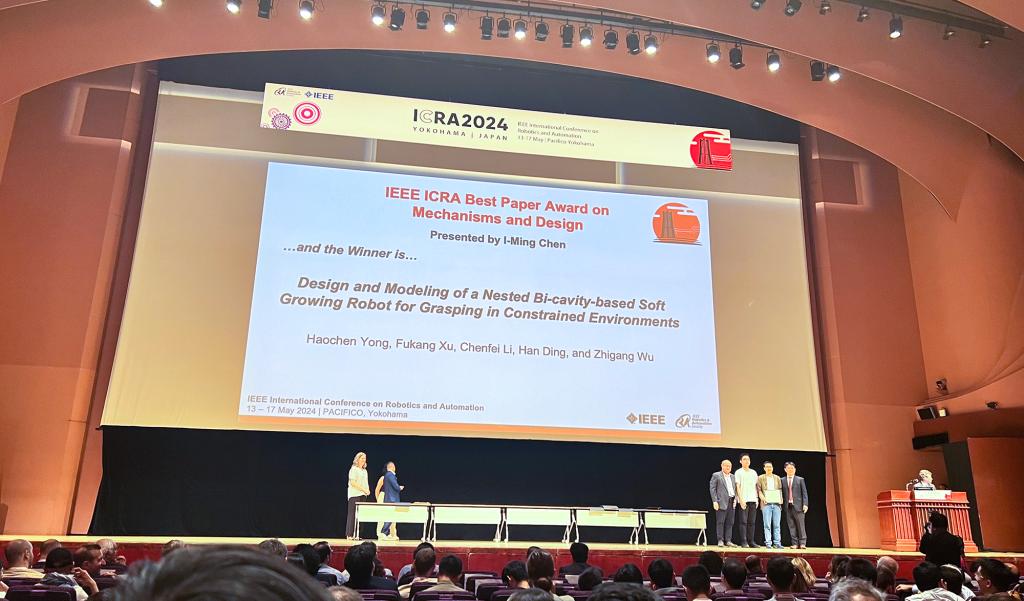
颁奖现场
具有独特导航机制(外翻延伸末端)且具备包覆抓取能力的软生长机器人在有限环境中有着巨大的应用前景。然而,在传统设计中,气腔末端依赖外翻向前生长,这会自然地与包覆抓取相冲突,并且末端集成执行器会从工作机制上会限制其在受限环境中的导航性能。若依靠气腔本身来操作物体可以赋予生长机器人一定的功能同时保留他们生长机制的导航优越性。通过设计一种基于同轴双气腔结构,该工作实现了一种新型的包覆抓取生长机器人,可以在没有额外设备的集成的条件下实现在受限环境中的包覆抓取等操作。在受限空间作业、搜救领域等领域有着很大的发挥空间和应用潜力。
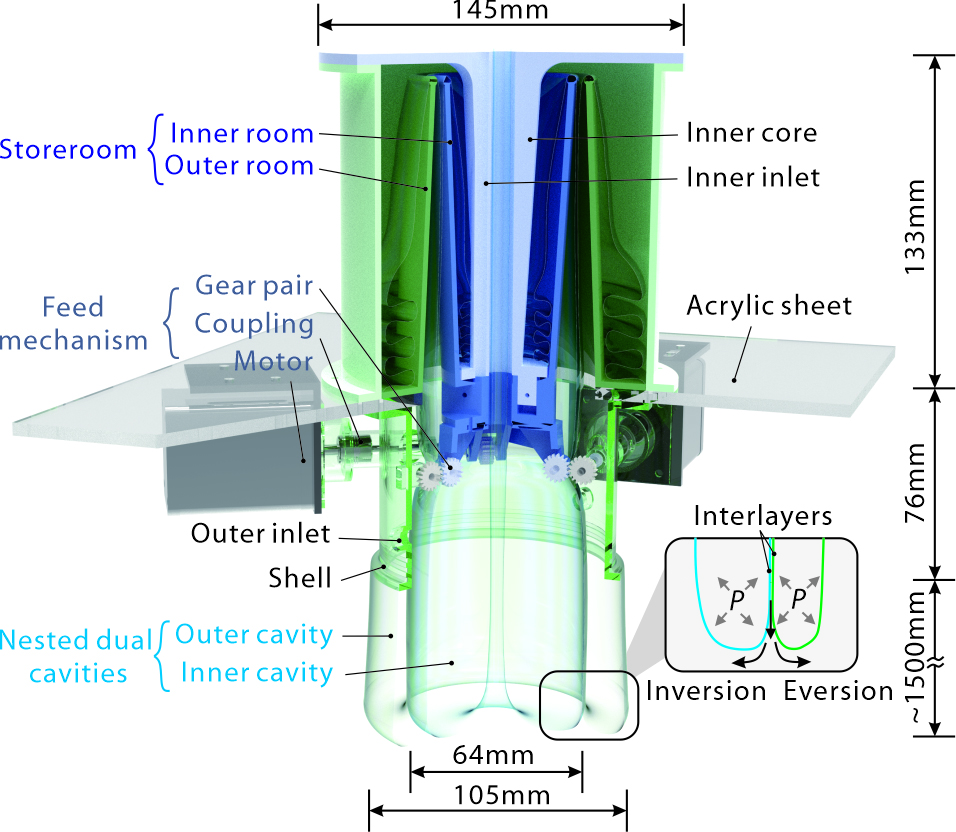
具有双气腔结构的包覆抓取生长机器人
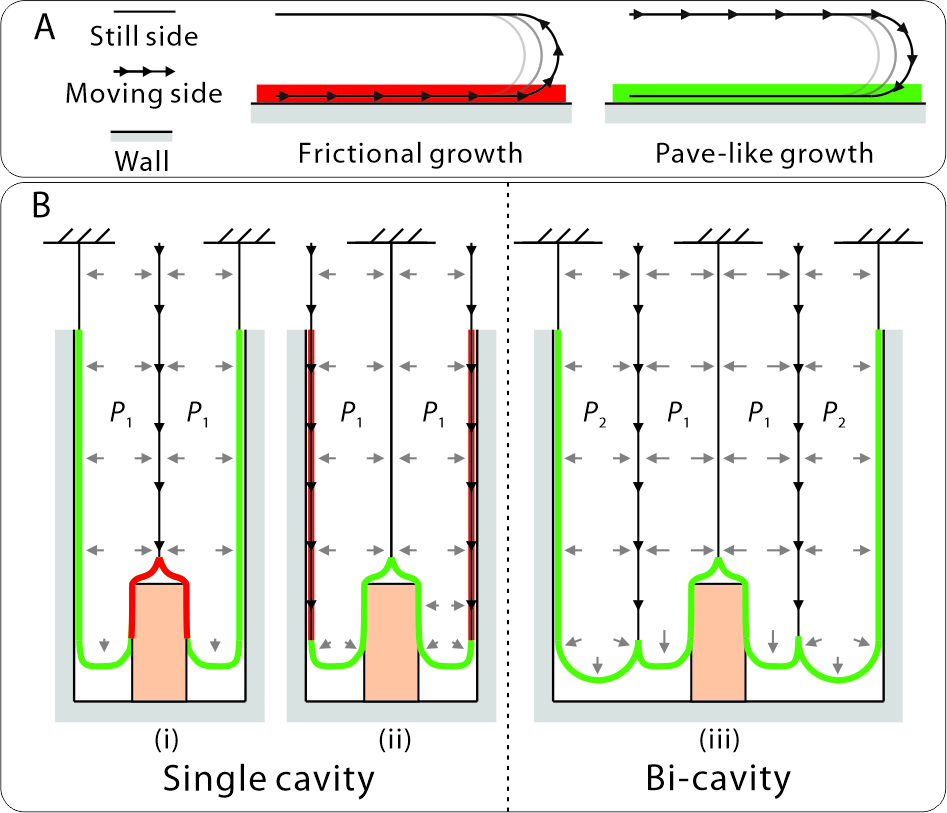
双气腔结构在有限空间内的包覆抓取机制
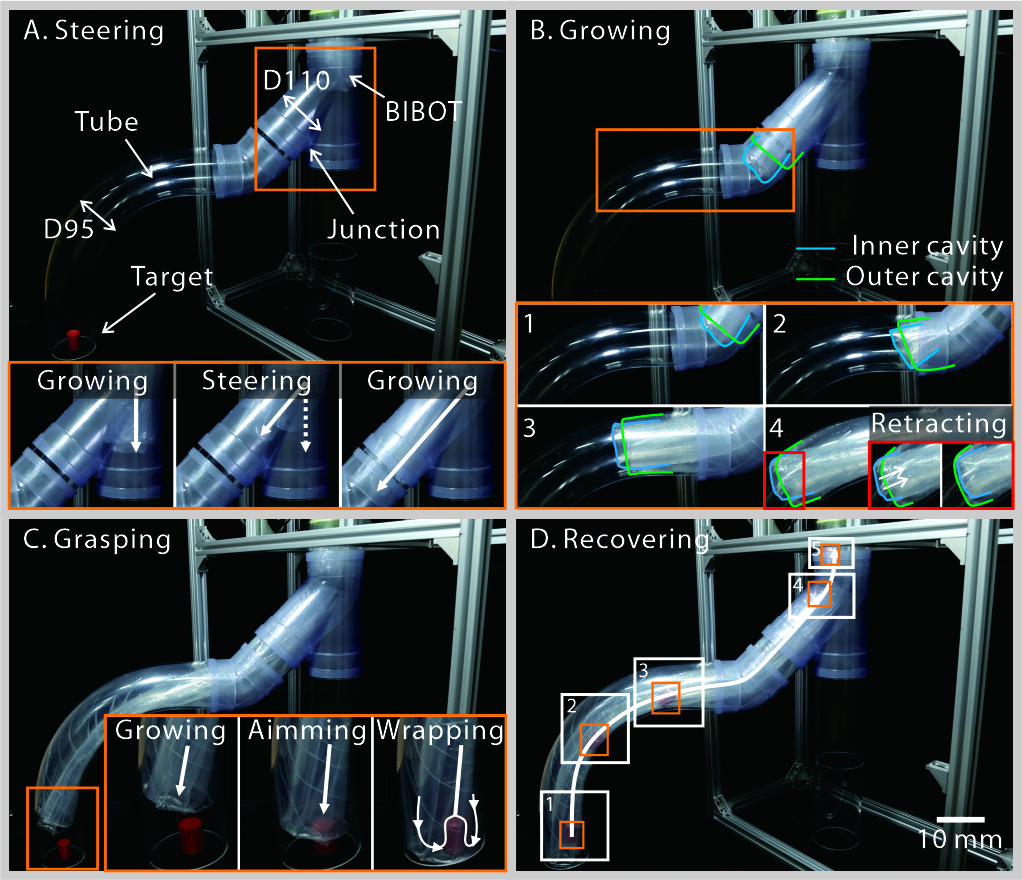
生长机器人在受限环境中完成包覆抓取任务
该工作受到了国家自然科学基金基础科学中心项目:机器人化智能制造(项目编号:52188102)的资助。